Marktplatz
-
kg-
€-
-
kg-
NFinger-Greifer
Fingergreifer gehören zu den wichtigsten Greifsystemen in Robotik und Automatisierung. Sie ermöglichen das präzise Aufnehmen, Halten und Bewegen von Werkstücken und eignen sich für viele Anwendungen im Teilehandling, in der Montage und in der Maschinenbestückung. In dieser Kategorie findest Du Fingergreifer für unterschiedliche Werkstücke, Greifkräfte und Automatisierungsaufgaben.
























Fingergreifer für Robotik und Automation: präzise Greiftechnik für viele industrielle Anwendungen
Fingergreifer gehören zu den am häufigsten eingesetzten Robotergreifern in der industriellen Automatisierung. Sie werden überall dort verwendet, wo Werkstücke präzise aufgenommen, gehalten, bewegt oder positioniert werden müssen. Ob im Teilehandling, in der Montage, bei Pick-and-Place-Prozessen oder in der Maschinenbe- und -entladung: Ein passender Fingergreifer ist ein zentraler Bestandteil vieler automatisierter Anwendungen.
Im Gegensatz zu anderen Greifsystemen arbeiten Fingergreifer mit mechanischen Greifbacken oder Greiffingern, die das Werkstück formschlüssig oder kraftschlüssig greifen. Dadurch eignen sie sich besonders gut für feste, definierte Bauteile mit klarer Geometrie. In der Robotik und im Maschinenbau sind Fingergreifer deshalb eine bewährte Lösung, wenn Werkstücke sicher und wiederholgenau gehandhabt werden sollen.
Was ist ein Fingergreifer?
Ein Fingergreifer ist ein mechanischer Greifer für Roboter, der Werkstücke mithilfe von zwei oder mehr Greiffingern aufnimmt. Er gehört zu den typischen Endeffektoren in der industriellen Automation und wird direkt am Roboter oder an einem anderen Handhabungssystem montiert. Seine Aufgabe ist es, ein Bauteil sicher zu greifen, zu halten und an eine andere Position zu bewegen oder dort exakt abzulegen.
Fingergreifer für Roboter kommen in vielen Branchen zum Einsatz, weil sie sehr vielseitig sind und sich an unterschiedliche Anwendungen anpassen lassen. Je nach Ausführung können sie kleine, filigrane Bauteile ebenso handhaben wie größere oder robustere Werkstücke. Entscheidend ist dabei immer, dass der Greifer zur Geometrie, zum Gewicht und zur Oberfläche des Werkstücks passt.
Wie funktioniert ein Fingergreifer?
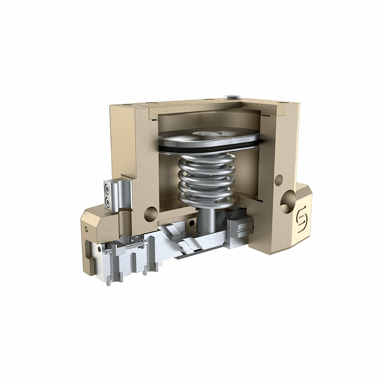
Die Funktionsweise eines Fingergreifers basiert auf beweglichen Greiffingern oder Greifbacken, die sich schließen und das Werkstück festhalten. Dabei kann das Greifen entweder über Reibung beziehungsweise Klemmkraft oder über eine formschlüssige Aufnahme erfolgen. Welche Variante sinnvoll ist, hängt von der Form und den Anforderungen des Bauteils ab.
In der Praxis gibt es unterschiedliche Konzepte, wie sich die Finger bewegen. Manche Greifer arbeiten parallel, andere zentrisch oder winkelbeweglich. Gemeinsam haben sie, dass sie Werkstücke kontrolliert aufnehmen und so eine zuverlässige Handhabung in automatisierten Prozessen ermöglichen. Genau deshalb sind Fingergreifer in vielen Standardanwendungen eine der ersten Lösungen, wenn ein Robotergreifer gesucht wird.
Welche Arten von Fingergreifern gibt es?
Fingergreifer gibt es in unterschiedlichen Ausführungen, damit sie für möglichst viele Anwendungen genutzt werden können. Besonders verbreitet sind 2-Finger-Greifer und 3-Finger-Greifer, je nach Werkstück und Greifanforderung.
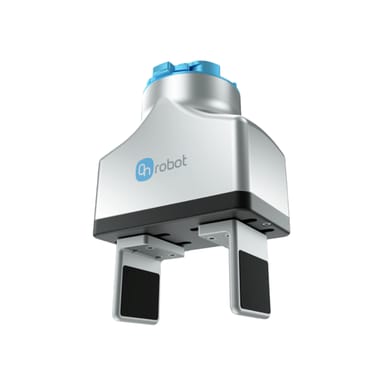
2-Finger-Greifer
2-Finger-Greifer sind besonders weit verbreitet und für viele Standardanwendungen geeignet. Sie greifen ein Werkstück von zwei Seiten und eignen sich gut für Bauteile mit klaren Außenkonturen. Gerade im Teilehandling, in der Maschinenbestückung oder in Montageprozessen sind sie eine sehr häufige Wahl.
Der Vorteil liegt in ihrer einfachen, robusten und vielseitigen Funktionsweise. Für viele definierte Werkstücke ist ein 2-Finger-Fingergreifer eine wirtschaftliche und zuverlässige Lösung.
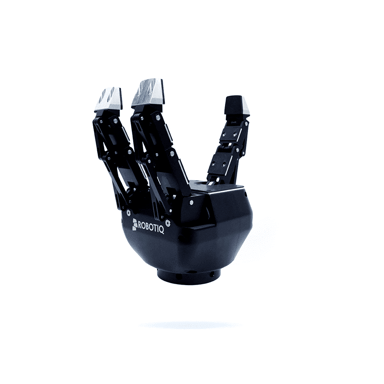
3-Finger-Greifer
3-Finger-Greifer bieten zusätzliche Stabilität beim Greifen und eignen sich besonders für runde oder symmetrische Werkstücke. Durch die drei Kontaktpunkte kann das Bauteil oft zentrischer aufgenommen und sicherer gehalten werden.
Das ist vor allem dann interessant, wenn Werkstücke besonders präzise positioniert oder rotationssymmetrische Teile gehandhabt werden müssen. In bestimmten Anwendungen bieten 3-Finger-Greifer deshalb Vorteile gegenüber klassischen 2-Finger-Lösungen.
Fingergreifer für verschiedene Werkstücke und Anforderungen
Ein großer Vorteil von Fingergreifern ist ihre Vielseitigkeit. Sie lassen sich für unterschiedlichste Werkstücke und Prozesse auslegen. Je nach Anwendung gibt es kompakte Modelle für kleine Bauteile, robuste Varianten für höhere Lasten oder spezielle Lösungen für besondere Geometrien.
Wichtige Auswahlkriterien sind unter anderem:
- Größe und Form des Werkstücks
- Gewicht des Bauteils
- Oberflächenbeschaffenheit
- erforderliche Greifkraft
- Taktzeit und Dynamik
- Einbausituation und Bauraum
-
Genauigkeit der Positionierung
Gerade weil Fingergreifer in so vielen Anwendungen eingesetzt werden, ist die richtige Auslegung entscheidend. Nur wenn Greifer und Werkstück sauber zusammenpassen, entsteht ein zuverlässiger und wirtschaftlicher Prozess.
Vorteile von Fingergreifern in der Automation
Fingergreifer sind in der industriellen Automatisierung so verbreitet, weil sie viele Vorteile mitbringen. Sie bieten ein direktes, kontrolliertes Greifprinzip und eignen sich für eine große Bandbreite an Werkstücken. Gleichzeitig lassen sie sich in viele Robotersysteme und Handhabungslösungen integrieren.
Zu den typischen Vorteilen von Fingergreifern gehören:
- präzises Greifen und Positionieren
- gute Eignung für feste Werkstücke mit definierter Geometrie
- vielseitige Einsatzmöglichkeiten
- zuverlässiges Handling in wiederkehrenden Prozessen
- gute Integration in Robotik und Automatisierung
-
passende Lösungen für unterschiedliche Greifkräfte und Größen
Gerade in Anwendungen, in denen Bauteile wiederholgenau bewegt oder exakt abgelegt werden müssen, sind Fingergreifer für Roboter eine sehr bewährte Lösung.
Typische Einsatzgebiete für Fingergreifer
Fingergreifer kommen in vielen Bereichen der industriellen Automation zum Einsatz. Besonders häufig werden sie dort verwendet, wo Bauteile präzise gehandhabt und sicher bewegt werden müssen. Typische Einsatzgebiete sind:
- Teilehandling
- Pick-and-Place
- Montageautomation
- Maschinenbe- und -entladung
- Zuführprozesse
- Prüf- und Sortieranwendungen
-
Handling von Werkstücken in Fertigungszellen
In all diesen Anwendungen spielt der Fingergreifer eine zentrale Rolle, weil er die direkte Schnittstelle zwischen Roboter und Werkstück bildet. Seine Qualität und Eignung wirken sich unmittelbar auf Prozesssicherheit, Zykluszeit und Präzision aus.
Fingergreifer in Robotik und End-of-Arm-Systemen
In der Robotik sind Fingergreifer ein klassischer Bestandteil des End-of-Arm-Bereichs. Sie werden am Roboterflansch montiert und machen aus einem Roboter erst ein anwendungsfähiges Handhabungssystem. In Kombination mit dem passenden Roboter, der richtigen Steuerung und gegebenenfalls zusätzlicher Sensorik entsteht eine leistungsfähige Lösung für unterschiedlichste Automatisierungsaufgaben.
Gerade weil Fingergreifer zu den wichtigsten Endeffektoren zählen, sind sie in vielen Branchen ein Standard. Sie lassen sich sowohl in einfachen Anwendungen als auch in komplexeren Automatisierungslösungen einsetzen und sind deshalb ein zentraler Baustein moderner Robotik.
Was bei der Auswahl eines Fingergreifers wichtig ist
Wenn Du den passenden Fingergreifer auswählst, solltest Du immer die konkrete Anwendung im Blick haben. Entscheidend sind nicht nur Werkstück und Greifkraft, sondern auch Taktzeit, Bauraum, Wiederholgenauigkeit und die Integration in das bestehende Robotersystem. Auch die Frage, ob ein 2-Finger-Greifer oder 3-Finger-Greifer besser geeignet ist, spielt eine wichtige Rolle.
Zusätzlich ist relevant, wie flexibel der Greifer in der Anwendung sein soll. Manche Prozesse arbeiten mit klar definierten Teilen, andere mit wechselnden Werkstücken oder unterschiedlichen Formaten. Der passende Fingergreifer für Robotik und Automation sollte deshalb immer zur realen Prozessanforderung passen.
Den passenden Fingergreifer für Deine Anwendung finden
In dieser Kategorie findest Du Fingergreifer für unterschiedlichste Anwendungen in Robotik, Maschinenbau und industrieller Automation. Ob für präzises Teilehandling, Montageprozesse oder Maschinenbestückung: Der richtige Fingergreifer sorgt dafür, dass Werkstücke sicher, wiederholgenau und effizient gehandhabt werden können.
Finde jetzt deine Automatisierungslösung mit unserem Konfigurator