Marché



0.58 kg
Calculateur de retour sur investissement
€2,200.00 - €2,600.00 hors TVA.
À partir de 300,00 € par mois avec la location-achat ou le paiement échelonné.
- Caractéristiques
- Vue d'ensemble
- Description
- Téléchargements
- FAQ
- Produits similaires
grâce à la course importante et librement programmable des mâchoires avec un réglage en continu de la force de préhension pour une manipulation flexible des pièces
particulièrement adapté aux exigences de l'automatisation des laboratoires et de la fabrication électronique grâce à la construction étanche et au guidage facile par rail profilé
en évitant la perte d'une pièce grâce au maintien intégré de la force de préhension avec détection des pertes
avec une force de préhension constante sur toute la longueur du doigt grâce à l'engrenage cylindrique intégré
Compatible avec les principaux fabricants du marché grâce à une offre variée d'interfaces de communication, ainsi que de modules de fonction API et de plug-ins pour robots
Featured on Unchained TV
Malheureusement, il n'y a pas encore de vidéos de cas d'utilisation pour ce produit. Regardez d'autres vidéos sur la robotique sur Unchained TV.
| Vue d'ensemble | ||
|---|---|---|
| Poids propre | 0.58 kg | |
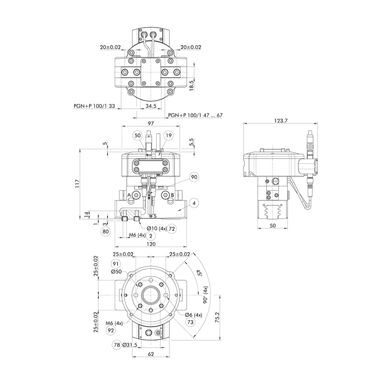
| Dimension | 83 x 62 x 78 mm | |
| Mode de fonctionnement | Elektrisch | |
| Performance | ||
|---|---|---|
| Température de fonctionnement min. | 5 °C | |
| Taille max. Température de fonctionnement | 55 °C | |
| Hub | 53 mm | |
| Max. Force de préhension | 50 N | |
| Heure de fermeture | 0.37 s | |
| Précision de répétition | 0.03 mm | |
| Interfaces | ||
|---|---|---|
| Tension d'alimentation | 24 V | |
| Propriétés | ||
|---|---|---|
| Classification IP | IP67 | |
Le SCHUNK EGK 25 est un préhenseur électrique pour la manipulation de petites pièces. Avec une course de 26,5mm par mâchoire et une force de préhension maximale de 50N, la pince est polyvalente. Avec son propre poids de 0,58 kg, elle peut parfaitement être utilisée avec des robots collaboratifs.
Fonction
Grâce aux composants intégrés dans le préhenseur, tu disposes d'un maximum de possibilités.
La fonctionnalité est à ta disposition. Les doigts de la pince peuvent être utilisés à grande vitesse.
vitesse ou pour plonger dans un support de pièces.
peuvent être pré-positionnés. La force de préhension peut être adaptée en continu à la situation.
être réglée en fonction des exigences de la manipulation de la pièce. Le site
reconnaissance de la pièce permet une transparence totale du processus pour l'utilisateur.
Dans une situation d'arrêt d'urgence, la perte de la pièce peut être évitée grâce à la fonction d'arrêt d'urgence.
le maintien intégré de la force de préhension peut être évité.
Il est possible de choisir entre les deux modes de fonctionnement.
modes de préhension BasicGrip et SoftGrip sont disponibles. Avec BasicGrip et BasicGrip
SoftGrip permet un fonctionnement continu du moteur et donc une prise permanente.
Il est possible de saisir la pièce. La vitesse de préhension est réglée avec
BasicGrip optimise automatiquement le réglage de la force de préhension. Avec SoftGrip
les pièces sensibles à la casse peuvent être saisies avec beaucoup de précaution,
en réduisant au maximum les forces d'impulsion lors de l'impact sur la pièce.
L'outil est conçu pour être utilisé dans des conditions extrêmes.
Caractéristiques techniques
- Moyeu pro Backe : 26.5mm
- Force de préhension minimale : 20N
- Taille max. Force de préhension : 50N
- Poids : 0,58kg
Connectivité
Une large gamme d'interfaces de communication disponibles simplifie la gestion de la diversité des fabricants de commandes et de robots et permet de gagner du temps lors de l'intégration. L'Ethernet industriel (PROFINET, EtherCAT, EtherNet/IP) permet une intégration directe sans passerelles supplémentaires dans l'environnement de contrôle des principaux fabricants d'API du marché. Avec l'interface série Modbus RTU, le préhenseur peut être connecté à la bride d'outil des principaux fabricants de robots sans câblage externe. IO-Link est indépendant et offre une flexibilité de connexion à d'autres réseaux.
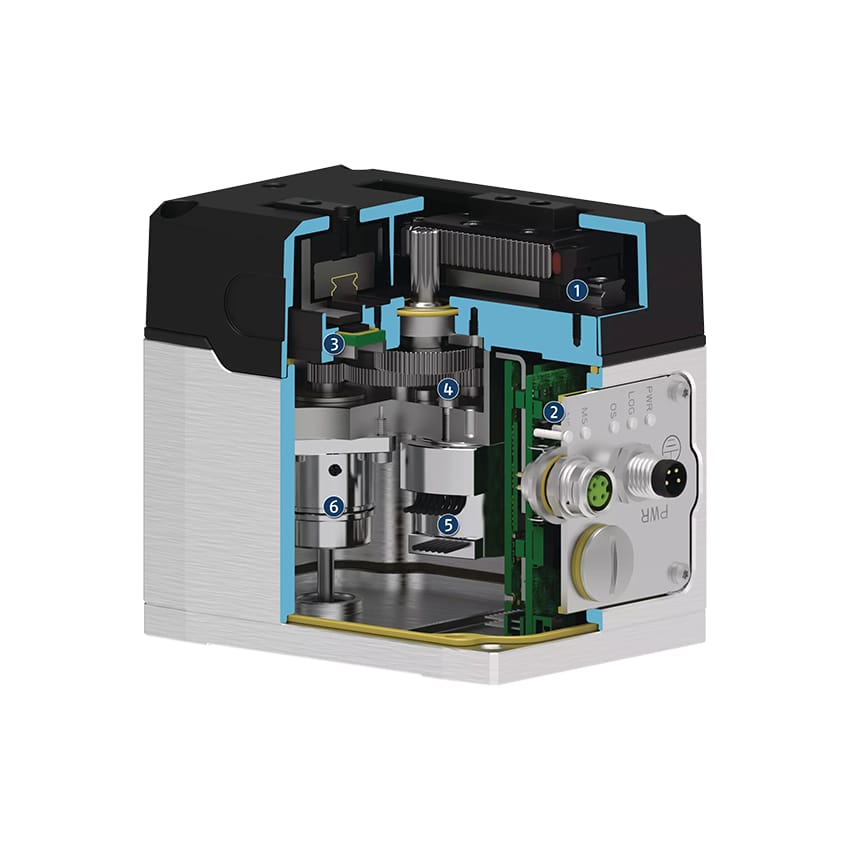
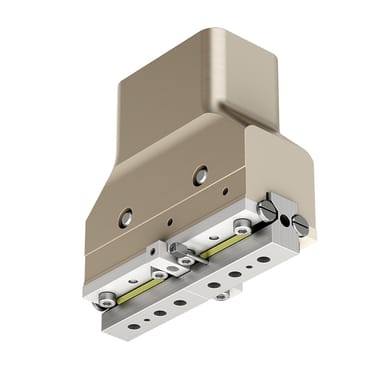
Image en coupe fonctionnelle
(dernière image en haut de cette page)
.
- Coulisse profilée facile à manier avec joint frontal en acier inoxydable, lubrification compatible avec les aliments et couvercle en polycarbonate résistant.
- Électronique de régulation et de puissance entièrement intégrée et étanche avec des LED d'état et des connecteurs M8 pour connecter l'alimentation et la communication.
- Encodeur absolu haute résolution côté sortie pour un positionnement précis des mâchoires de la pince avec un retour de position absolu permanent.
- Chaîne cinématique étanche avec engrenage droit et principe de pignon-crémaillère pour une force de préhension constante sur toute la longueur du doigt, sans distance d'approche minimale.
- Moteur plat sans balais pour les espaces limités et les couples élevés grâce au rotor situé à l'extérieur.
- Frein électromagnétique avec un mécanisme supplémentaire pour maintenir la force de préhension et la position en cas d'arrêt ou de coupure de courant.

Pour passer une commande, envoie-nous une demande via le bouton en haut de la page ou contacte-nous via le chat.
Unchained Robotics est la plus grande place de marché pour tout ce qui concerne l'automatisation. Nous avons plus de 36 marques avec 9 catégories différentes telles que Cobots, Grippers, Cameras, Starter-kits, Accessoires de fin de bras, Kits d'enseignement, Solution clé en main, Cobot-Base et même
Services. Pour plus d'informations, consulte notre page A propos.
Nous avons la réponse pour toi dans une série d'articles de blog ci-dessous:
Was du bei der Auswahl eines Cobots beachten solltest - The Specs that Matter
The Specs that Matter Die Top 10 Fragen zur Roboterwahl
.


Parle à un Expert en automatisation
Tu as des questions sur ce produit, sur les prix ou sur tes projets d'automatisation ? Remplis le formulaire et un expert en automatisation de notre équipe te contactera dans les 24 heures.
Tristan Stöppel
Ingénieur commercial composantsMondial
Henning Stoppel
Ingénieur commercialGermany
Jens Berg
Ingénieur commercialGermany
Sebastian Hren
responsable d'AffairesMondial