Marketplace
Assembly with the OnRobot HEX force torque sensor and RG2 gripper
In the video

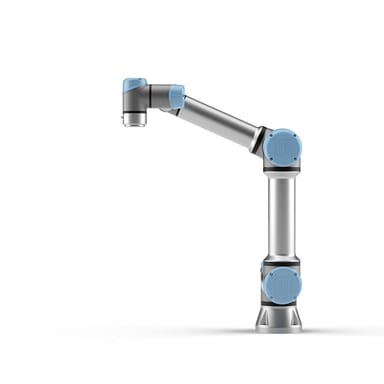
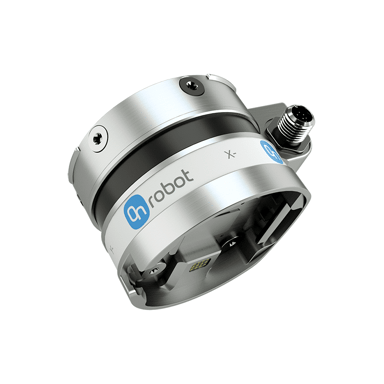


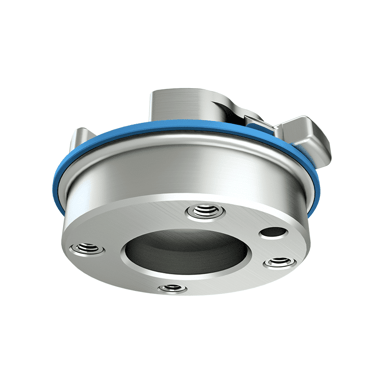


Through the combination of an OnRobot HEX force/torque sensor and RG2 gripper with a UR cobot, a powerful and sensitive automated solution can be put together.
In this example use case, the torque measurements provided by the OnRobot HEX allows the cobot to determine when to stop turning. The RG2 two finger gripper allows for the careful gripping parts that may vary in shape, position, or weight.
A cobot from Universal Robots forms the base of this solution. It's famous accuracy and dependability, as well as safety make it an ideal cobot for this pair of end-of-arm tools.
Share video
You might be interested in...

Removing parting lines with the OnRobot HEX force/torque sensor and RG2 gripper

Pick&Place and assembly use cases with the OnRobot RG2-FT

OMRON cobots give transmission manufacturer Fischer a competitive edge in production

Fast tool change with Nordbo's magnetic tool changer and a UR Cobot