Marketplace
Removing parting lines with the OnRobot HEX force/torque sensor and RG2 gripper
In the video
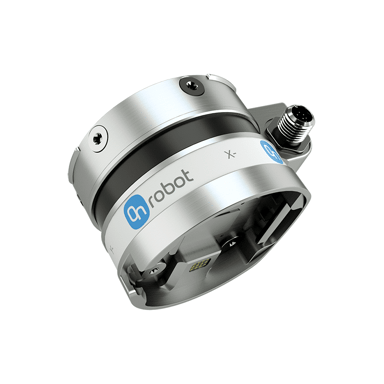



Durch die Kombination eines OnRobot HEX Kraft-/Drehmomentsensors und eines RG2-Greifers mit einem UR-Cobot kann eine leistungsstarke und feinfühlige automatisierte Lösung zusammengestellt werden.
In diesem Anwendungsbeispiel ermöglichen die vom OnRobot HEX bereitgestellten Drehmomentmessungen dem Cobot, Trennlinien präzise und wiederholbar von einem Werkstück zu entfernen. Der Zweifingergreifer RG2 ermöglicht das sorgfältige Greifen von Teilen, die in Form, Position oder Gewicht variieren können.
Ein Cobot von Universal Robots bildet die Basis dieser Lösung. Seine bekannte Genauigkeit und Zuverlässigkeit sowie seine Sicherheit machen ihn zum idealen Cobot für dieses Paar von End-of-Arm-Werkzeugen.
Share video
You might be interested in...

Removing parting lines with the OnRobot HEX force/torque sensor and RG2 gripper

A DOBOT CR5 Cobot and an M1 SCARA Robot deftly handle assembly and unloading tasks.

Fast tool change with Nordbo's magnetic tool changer and a UR Cobot

Weld removal without code with Nordbo sensor and a cobot from Universal Robots

Sanding and polishing a car door with the Nordbo Mimic Kit and a UR Cobot

Deburring with the OnRobot HEX force-moment sensor

Flexible production through automation with OMRON Cobots

Polishing wood and metal parts with the OnRobot HEX force torque sensor

Surface cleaning with the OnRobot HEX force/torque sensor

Grinding and polishing with the OnRobot Sander and a Cobot from Universal Robots

Collaborative machine operation with the Kassow Robots KR810

Automated polishing with the Nordbo Mimic Kit and a cobot from Universal Robots

Assembly with the OnRobot HEX force torque sensor and RG2 gripper

OMRON cobots give transmission manufacturer Fischer a competitive edge in production

Weld seam removal with Nordbo Robotics and a cobot from AUBO Robotics