Marketplace
Collaborative machine operation with the Kassow Robots KR810


Machine tending is a common and often very repetitive process in the modern manufacturing environment. Thankfully, these processes can often be relatively easily automated with modern collaborative tools.
In this video we see a real world use case on a factory floor where a cobot from Kassow Robots is being used in a machine tending process together with a human coworker.
This is a particularly good example of human-machine collaboration.
With their robust joints and 7 degrees of freedom, Kassow Robots offers a powerful solution to many automation problems.
Share video
You might be interested in...
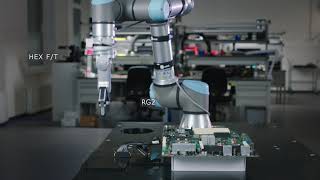
Connector assembly with the OnRobot HEX force torque sensor and RG2 gripper

Pin insertion with the OnRobot RG2-FT gripper

Fast tool change with Nordbo's magnetic tool changer and a UR Cobot

Removing parting lines with the OnRobot HEX force/torque sensor and RG2 gripper

Collaborative machine operation with the Kassow Robots KR810

OMRON cobots give transmission manufacturer Fischer a competitive edge in production

Innovative use of OMRON cobots improves safety at Leica Geosystems

Assembly with the OnRobot HEX force torque sensor and RG2 gripper